




MS6MT
Weighing 21 kg with flexible deployment of mechanical arms within half a day on average to perform new tasks
12 hollow wires are attached at the end of robot to prevent tools and cables from entanglement
A friction brake is installed, and the end will not fall when powered off
Dragging teaching for easy work
Multiple degrees of freedom Human-machine collaboration
MS6MT-0900-3546 

Model
MS6MT-0900-3546
Number of axes
6
Max. load
6 kg
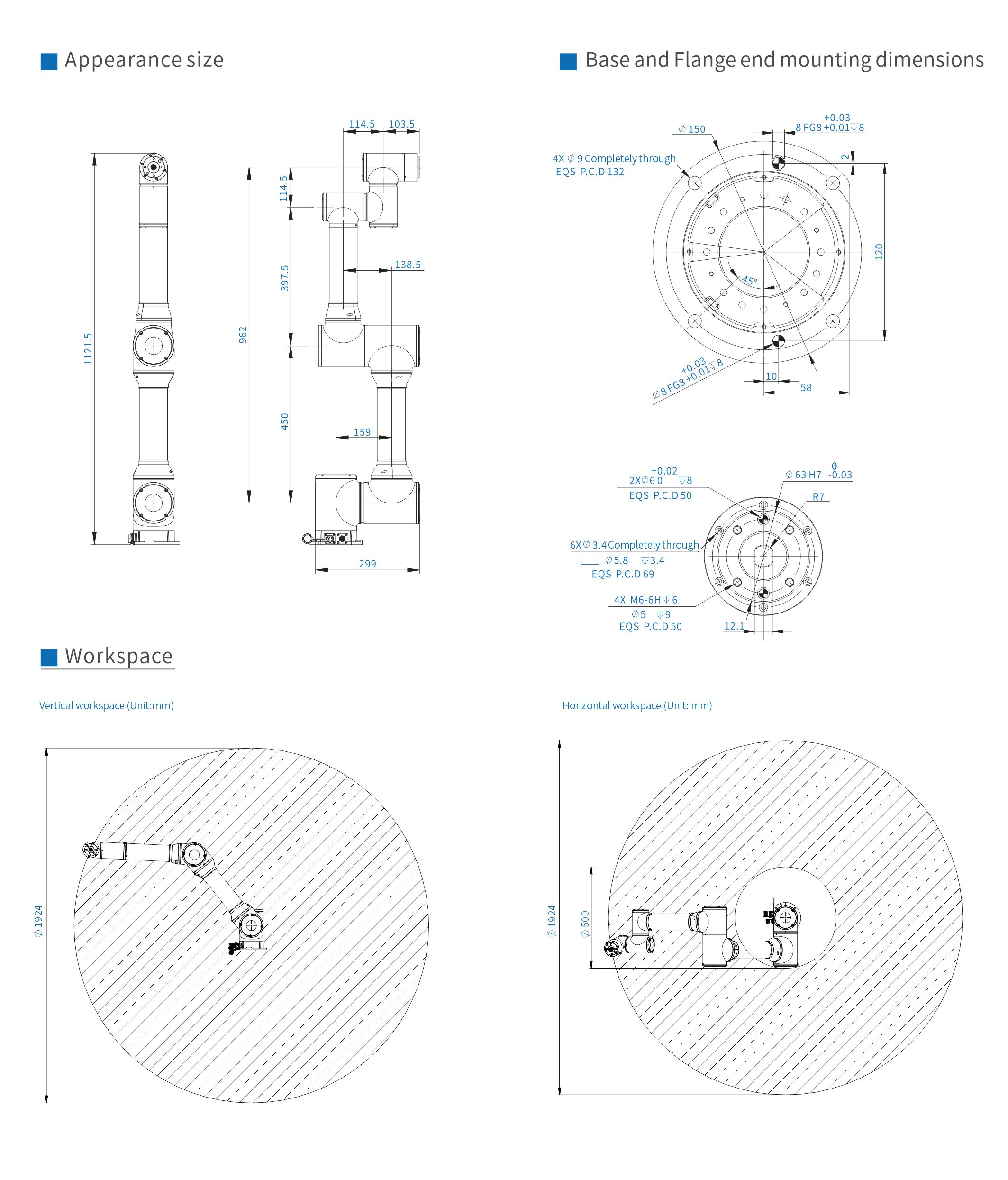
Arm length
962 mm
Max. range of motion
J1
± 360°
J2
± 360°
J3
± 360°
J4
± 360°
J5
± 360°
J6
± 360°
Maximum resultant speed
1000 mm/s
Max. speed of motion
J1
120° /s
J2
120° /s
J3
120° /s
J4
216° /s
J5
216° /s
J6
216° /s
Repeated positioning accuracy
± 0.1 mm
Installation method
Forward mounting, Wall mounting, Inverted mounting
Total weight
21 kg
IP Protection class
IP 54
I/O Interface*1
14 inputs,14 outputs
Communication interface
Ethernet, RS-232,Modbus TCP
Rated voltage
DC 48V
Rated power
0.5 kW
Working environment
Ambient temperature: -10 ~ 50℃; Relative humidity: ≤ 95% (non-condensing)
*1:I/O expansion is possible through Modbus TCP protocol.
File name
Download format
File size
Release time



 MS6MT-0900-3546
MS6MT-0900-3546Release time:2023-03-15






